-
I am attemptiong to connect to mpu6050 via IC on Ch32v003c8t6.
I have used 6050 in the past successfully on Arduino.
But I am having trouble with it on Ch32 chips.
My version uses Ch32f003 I2C Eeprom as base code.
https://github.com/cjacker/ch32v003evt_gcc_makefile/blob/main/Examples/I2C/I2C_EEPROM/User/main.c
I used these as 6050 I2C models :
https://bbs.21ic.com/icview-3129252-1-1.html
https://www.risc-v1.com/thread-1625-1-1.html
Note that there is old code at beginning converted from - not used now : IIC_ReadByte() , MPU_Read_Byte(), etc.
But it locks up waiting at first I2C write.
Seems to be hooked up right :Code: [Select]Ch32v003f4p6: Mpu6050:
3V3 -> Vcc
Gnd -> Gnd
PC1 -> SDA
PC2 -> SCL
6050 Code :Code: [Select]/*
FAQs :
- Wrong I2C pins for 003 : PC1=SDA PC2=SCL , not PA1=SDA PA2=SCL
The VCC and GND pins of the CH32V103 development board are connected to the VCC and GND pins of the MPU6050 module.
PC1 = SDA : The PC1 pin of the CH32V003 development board is connected to the SDA pin of the MPU6050 module
PC2 = SCL : The PC2 pin of the CH32V003 development board is connected to the SCL pin of the MPU6050 module
//The VCC and GND pins of the CH32V103 development board are connected to the VCC and GND pins of the MPU6050 module.
// PA1 = SDA : The PA1 pin of the CH32V103 development board is connected to the SDA pin of the MPU6050 module
// PA2 = SCL : The PA2 pin of the CH32V103 development board is connected to the SCL pin of the MPU6050 module
Mpu6050 : Id Address = 0x68 wrt , 0x59 rd
- Compiles Downloads , Returns same data : Temp=175, AX=-11823 , AY=-11823 , AZ=-11823 , GX=-11823 , AGY=-11823 , GZ=-11823
- TX = PA9
- RX = PA10
*/
/*
*@Note
I2C interface routine to operate EEPROM peripheral:
I2C1_SCL(PC2)\I2C1_SDA(PC1).
This example uses EEPROM for AT24Cxx series.
Steps:
READ EEPROM:Start + 0xA0 + 8bit Data Address + Start + 0xA1 + Read Data + Stop.
WRITE EERPOM:Start + 0xA0 + 8bit Data Address + Write Data + Stop.
*/
#include "debug.h"
///
u8 AT24CXX_ReadOneByte( u16 ReadAddr ) ;
void AT24CXX_WriteOneByte( u16 WriteAddr, u8 DataToWrite ) ;
void AT24CXX_Read( u16 ReadAddr, u8 *pBuffer, u16 NumToRead ) ;
void AT24CXX_Write( u16 WriteAddr, u8 *pBuffer, u16 NumToWrite ) ;
///
#ifndef __MPU6050_H
#define __MPU6050_H
// #include "iic.h"
#include "debug.h"
//MPU6050 AD0
/*
#define MPU_AD0_H GPIO_SetBits( GPIOA,GPIO_Pin_15) // SDA
#define MPU_AD0_L GPIO_ResetBits(GPIOA,GPIO_Pin_15) // SDA
*/
// 003-c8t6 : - SCL=A6 , SDA=A7 :
#define MPU_AD0_H GPIO_SetBits( GPIOC,GPIO_Pin_1) // SDA
#define MPU_AD0_L GPIO_ResetBits(GPIOC,GPIO_Pin_1) // SDA
/*
// 203-c8t6 : - SCL=C2 , SDA=C1 :
#define MPU_AD0_H GPIO_SetBits( GPIOC,GPIO_Pin_1) // SDA
#define MPU_AD0_L GPIO_ResetBits(GPIOC,GPIO_Pin_1) // SDA
*/
#define MPU_ACCEL_OFFS_REG 0X06 //accel_offs
#define MPU_PROD_ID_REG 0X0C //prod id
#define MPU_SELF_TESTX_REG 0X0D //X
#define MPU_SELF_TESTY_REG 0X0E //Y
#define MPU_SELF_TESTZ_REG 0X0F //Z
#define MPU_SELF_TESTA_REG 0X10 //A
#define MPU_SAMPLE_RATE_REG 0X19 //
#define MPU_CFG_REG 0X1A //
#define MPU_GYRO_CFG_REG 0X1B //
#define MPU_ACCEL_CFG_REG 0X1C //
#define MPU_MOTION_DET_REG 0X1F //
#define MPU_FIFO_EN_REG 0X23 //FIFO
#define MPU_I2CMST_CTRL_REG 0X24 //IIC
#define MPU_I2CSLV0_ADDR_REG 0X25 //IIC
#define MPU_I2CSLV0_REG 0X26 //IIC
#define MPU_I2CSLV0_CTRL_REG 0X27 //IIC
#define MPU_I2CSLV1_ADDR_REG 0X28 //IIC
#define MPU_I2CSLV1_REG 0X29 //IIC
#define MPU_I2CSLV1_CTRL_REG 0X2A //IIC
#define MPU_I2CSLV2_ADDR_REG 0X2B //IIC2
#define MPU_I2CSLV2_REG 0X2C //IIC2
#define MPU_I2CSLV2_CTRL_REG 0X2D //IIC2
#define MPU_I2CSLV3_ADDR_REG 0X2E //IIC3
#define MPU_I2CSLV3_REG 0X2F //IIC3
#define MPU_I2CSLV3_CTRL_REG 0X30 //IIC3
#define MPU_I2CSLV4_ADDR_REG 0X31 //IIC4
#define MPU_I2CSLV4_REG 0X32 //IIC4
#define MPU_I2CSLV4_DO_REG 0X33 //IIC4
#define MPU_I2CSLV4_CTRL_REG 0X34 //IIC4
#define MPU_I2CSLV4_DI_REG 0X35 //IIC4
#define MPU_I2CMST_STA_REG 0X36 //IIC
#define MPU_INTBP_CFG_REG 0X37 // /
#define MPU_INT_EN_REG 0X38 //
#define MPU_INT_STA_REG 0X3A //
#define MPU_ACCEL_XOUTH_REG 0X3B //X 8
#define MPU_ACCEL_XOUTL_REG 0X3C //X 8
#define MPU_ACCEL_YOUTH_REG 0X3D //Y 8
#define MPU_ACCEL_YOUTL_REG 0X3E //Y 8
#define MPU_ACCEL_ZOUTH_REG 0X3F //Z 8
#define MPU_ACCEL_ZOUTL_REG 0X40 //Z 8
#define MPU_TEMP_OUTH_REG 0X41 //
#define MPU_TEMP_OUTL_REG 0X42 //8
#define MPU_GYRO_XOUTH_REG 0X43 //X 8
#define MPU_GYRO_XOUTL_REG 0X44 //X 8
#define MPU_GYRO_YOUTH_REG 0X45 //Y 8
#define MPU_GYRO_YOUTL_REG 0X46 //Y 8
#define MPU_GYRO_ZOUTH_REG 0X47 //Z 8
#define MPU_GYRO_ZOUTL_REG 0X48 //Z 8
#define MPU_I2CSLV0_DO_REG 0X63 //IIC0
#define MPU_I2CSLV1_DO_REG 0X64 //IIC1
#define MPU_I2CSLV2_DO_REG 0X65 //IIC2
#define MPU_I2CSLV3_DO_REG 0X66 //IIC3
#define MPU_I2CMST_DELAY_REG 0X67 //IIC
#define MPU_SIGPATH_RST_REG 0X68 //
#define MPU_MDETECT_CTRL_REG 0X69 //
#define MPU_USER_CTRL_REG 0X6A //
#define MPU_PWR_MGMT1_REG 0X6B //1
#define MPU_PWR_MGMT2_REG 0X6C //2
#define MPU_FIFO_CNTH_REG 0X72 //FIFO
#define MPU_FIFO_CNTL_REG 0X73 //FIFO
#define MPU_FIFO_RW_REG 0X74 //FIFO
#define MPU_DEVICE_ID_REG 0X75 //ID
#define MPU_ADDR 0X68
//#define MPU_READ 0XD1
//#define MPU_WRITE 0XD0
u8 MPU_Init(void); //MPU6050
u8 MPU_Write_Len(u8 addr,u8 reg,u8 len,u8 *buf);//IIC
u8 MPU_Read_Len(u8 addr,u8 reg,u8 len,u8 *buf); //IIC
u8 MPU_Write_Byte(u8 reg,u8 data); //IIC
u8 MPU_Read_Byte(u8 reg); //IIC
u8 MPU_Set_Gyro_Fsr(u8 fsr);
u8 MPU_Set_Accel_Fsr(u8 fsr);
u8 MPU_Set_LPF(u16 lpf);
u8 MPU_Set_Rate(u16 rate);
u8 MPU_Set_Fifo(u8 sens);
short MPU_Get_Temperature(void);
u8 MPU_Get_Gyroscope(short *gx,short *gy,short *gz);
u8 MPU_Get_Accelerometer(short *ax,short *ay,short *az);
#endif
///
// MPU6050.c //
// #include "mpu6050.h"
/*
#include "debug.h"
*/
//
#ifdef OLD_CODE
/*
void IIC_Start( u8 Flg )
{
while( I2C_GetFlagStatus( I2C1, I2C_FLAG_BUSY ) != RESET );
I2C_GenerateSTART( I2C1, Flg );
while( !I2C_CheckEvent( I2C1, I2C_EVENT_MASTER_MODE_SELECT ) );
}
*/
void IIC_Start()
{
while( I2C_GetFlagStatus( I2C1, I2C_FLAG_BUSY ) != RESET );
I2C_GenerateSTART( I2C1, ENABLE );
while( !I2C_CheckEvent( I2C1, I2C_EVENT_MASTER_MODE_SELECT ) );
}
/*
void IIC_Stop( u8 Flg )
{
I2C_GenerateSTOP( I2C1, Flg );
}
*/
void IIC_Stop()
{
I2C_GenerateSTOP( I2C1, ENABLE );
}
int IIC_WaitAck()
{
while( I2C_GetFlagStatus( I2C1, I2C_FLAG_BUSY ) != RESET ) {}
return 0;
}
void IIC_SendByte( u8 Dat )
{
I2C_SendData( I2C1, Dat );
}
u8 IIC_ReadByte( u8 Dat )
{
u8 R ;
R = I2C_ReceiveData( I2C1 );
return( R );
}
#endif // - OLD_CODE .
/*
u8 MPU_Init(void)
{
u8 res;
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE); //AFIO
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE); //IO PORTA
// GPIO_InitStructure.GPIO_Pin = GPIO_Pin_15; //
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_7; //
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //IO 50MHz
GPIO_Init(GPIOA, &GPIO_InitStructure); //GPIOA
GPIO_PinRemapConfig(GPIO_Remap_SWJ_JTAGDisable,ENABLE); //JTAG PA15 IO PA15 O!!!
MPU_AD0_L; // MPU6050 AD0 :0X68
IIC_Init(); //IIC
MPU_Write_Byte(MPU_PWR_MGMT1_REG,0X80); //MPU6050
Delay_Ms(100);
MPU_Write_Byte(MPU_PWR_MGMT1_REG,0X00); //MPU6050
MPU_Set_Gyro_Fsr(3); //2000dps
MPU_Set_Accel_Fsr(0); //2g
MPU_Set_Rate(50); //50Hz
MPU_Write_Byte(MPU_INT_EN_REG,0X00); //
MPU_Write_Byte(MPU_USER_CTRL_REG,0X00); //I2C
MPU_Write_Byte(MPU_FIFO_EN_REG,0X00); //FIFO
MPU_Write_Byte(MPU_INTBP_CFG_REG,0X80); //INT
res=MPU_Read_Byte(MPU_DEVICE_ID_REG);
if(res==MPU_ADDR)// ID
{
MPU_Write_Byte(MPU_PWR_MGMT1_REG,0X01); //CLKSEL,PLL X
MPU_Write_Byte(MPU_PWR_MGMT2_REG,0X00); //
MPU_Set_Rate(50); //50Hz
}
else
return 1;
return 0;
}
*/
/*
void IIC_Init(u32 bound, u16 address)
// u8 MPU_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure={0};
I2C_InitTypeDef I2C_InitTSturcture={0};
RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOC | RCC_APB2Periph_AFIO, ENABLE );
RCC_APB1PeriphClockCmd( RCC_APB1Periph_I2C1, ENABLE );
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_OD;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init( GPIOC, &GPIO_InitStructure );
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_OD;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init( GPIOC, &GPIO_InitStructure );
I2C_InitTSturcture.I2C_Mode = I2C_Mode_I2C;
I2C_InitTSturcture.I2C_ClockSpeed = bound;
I2C_InitTSturcture.I2C_DutyCycle = I2C_DutyCycle_2;
I2C_InitTSturcture.I2C_OwnAddress1 = address;
I2C_InitTSturcture.I2C_Ack = I2C_Ack_Enable;
I2C_InitTSturcture.I2C_AcknowledgedAddress = I2C_AcknowledgedAddress_7bit;
MPU_AD0_L ; // MPU6050 AD0 0X68
I2C_Init( I2C1, &I2C_InitTSturcture );
I2C_Cmd( I2C1, ENABLE );
// IIC_SendByte( ENABLE ) ; // - ???
// I2C_AcknowledgeConfig( I2C1, ENABLE );
// IIC_WaitAck(); // - ???
while( I2C_GetFlagStatus( I2C1, I2C_FLAG_BUSY ) != RESET ) {} // - ???
// ??? :
MPU_Write_Byte(MPU_PWR_MGMT1_REG,0X80); //MPU6050
Delay_Ms(100);
MPU_Write_Byte(MPU_PWR_MGMT1_REG,0X00); //MPU6050
MPU_Set_Gyro_Fsr(3); //+-2000dps
MPU_Set_Accel_Fsr(0); //+-2g
MPU_Set_Rate(50); //50Hz
MPU_Write_Byte(MPU_INT_EN_REG,0X00); //
MPU_Write_Byte(MPU_USER_CTRL_REG,0X00); //I2C
MPU_Write_Byte(MPU_FIFO_EN_REG,0X00); //FIFO
MPU_Write_Byte(MPU_INTBP_CFG_REG,0X80); //INT
int res ;
res = MPU_Read_Byte(MPU_DEVICE_ID_REG);
if(res == MPU_ADDR) // ID
{
MPU_Write_Byte(MPU_PWR_MGMT1_REG,0X01); // CLKSEL,PLL X
MPU_Write_Byte(MPU_PWR_MGMT2_REG,0X00); //
MPU_Set_Rate(50); // 50Hz
}
// else
// return 1;
// return 0;
}
*/
//fsr:0,250dps;1,500dps;2,1000dps;3,2000dps
u8 MPU_Set_Gyro_Fsr(u8 fsr)
{
// // return( MPU_Write_Byte( MPU_GYRO_CFG_REG , fsr << 3 ) );//
AT24CXX_WriteOneByte( MPU_GYRO_CFG_REG , fsr << 3 ) ;
return( 0 );
}
u8 MPU_Set_Accel_Fsr(u8 fsr)
{
// // return MPU_Write_Byte( MPU_ACCEL_CFG_REG , fsr << 3 );//
AT24CXX_WriteOneByte( MPU_ACCEL_CFG_REG , fsr << 3 ) ;
return( 0 );
}
u8 MPU_Set_LPF(u16 lpf)
{
u8 data = 0;
if( lpf >= 188 )
data=1;
else if( lpf >= 98 )
data=2;
else if( lpf >= 42 )
data=3;
else if( lpf >= 20 )
data=4;
else if( lpf >= 10 )
data=5;
else
data = 6;
// // return( MPU_Write_Byte( MPU_CFG_REG , data ) );
// return( AT24CXX_WriteOneByte( MPU_CFG_REG , data ) );
AT24CXX_WriteOneByte( MPU_CFG_REG , data ) ;
return(0);
}
u8 MPU_Set_Rate(u16 rate)
{
u8 data;
if(rate > 1000)
rate = 1000;
if(rate < 4)
rate = 4;
data = 1000 / rate - 1 ;
// // data = MPU_Write_Byte( MPU_SAMPLE_RATE_REG , data ); //
AT24CXX_WriteOneByte( MPU_SAMPLE_RATE_REG , data ); //
return MPU_Set_LPF( rate / 2 ); //LPF
}
short MPU_Get_Temperature(void)
{
u8 buf[2];
short raw;
float temp;
// // MPU_Read_Len( MPU_ADDR , MPU_TEMP_OUTH_REG , 2 , buf );
AT24CXX_Read( MPU_TEMP_OUTH_REG , buf , 2 );
raw = ((u16)buf[0]<<8) | buf[1];
temp = 36.53 + ((double)raw) / 340;
return( temp * 100 );
}
u8 MPU_Get_Gyroscope(short *gx,short *gy,short *gz)
{
u8 buf[6],res = 0 ;
// // res = MPU_Read_Len( MPU_ADDR , MPU_GYRO_XOUTH_REG , 6 , buf );
AT24CXX_Read( MPU_GYRO_XOUTH_REG , buf , 6 );
// // if( res == 0 )
{
*gx = ((u16)buf[0]<<8) | buf[1];
*gy = ((u16)buf[2]<<8) | buf[3];
*gz = ((u16)buf[4]<<8) | buf[5];
printf("GYRO : X=%d , Y=%d , Z=%d \r\n",*gx,*gy,*gz);
}
return res;;
}
u8 MPU_Get_Accelerometer(short *ax,short *ay,short *az)
{
u8 buf[6] , res = 0 ;
// // res = MPU_Read_Len( MPU_ADDR , MPU_ACCEL_XOUTH_REG , 6 , buf );
AT24CXX_Read( MPU_ACCEL_XOUTH_REG , buf , 6 );
// // if( res == 0 )
{
*ax = ((u16)buf[0]<<8) | buf[1];
*ay = ((u16)buf[2]<<8) | buf[3];
*az = ((u16)buf[4]<<8) | buf[5];
printf("ACC : X=%d , Y=%d , Z=%d \r\n", *ax , *ay , *az );
}
return res;;
}
#ifdef OLD_CODE
u8 MPU_Write_Len(u8 addr,u8 reg,u8 len,u8 *buf)
{
u8 i;
IIC_Start();
IIC_SendByte((addr<<1)|0); //
if( IIC_WaitAck() ) //
{
IIC_Stop();
return 1;
}
IIC_SendByte(reg); //
IIC_WaitAck(); //
for(i=0;i<len;i++)
{
IIC_SendByte(buf[i]); //
if( IIC_WaitAck() ) //ACK
{
IIC_Stop();
return 1;
}
}
IIC_Stop();
return 0;
}
u8 MPU_Read_Len(u8 addr,u8 reg,u8 len,u8 *buf)
{
IIC_Start();
IIC_SendByte((addr<<1)|0);//
if(IIC_WaitAck()) //
{
IIC_Stop();
return 1;
}
IIC_SendByte(reg); //
IIC_WaitAck(); //
IIC_Start();
IIC_SendByte((addr<<1)|1);//
IIC_WaitAck(); //
while(len)
{
if(len==1)
* buf = IIC_ReadByte(0);//nACK
else
* buf = IIC_ReadByte(1); //ACK
printf( " <%02X> " , * buf );
len--;
buf++;
}
IIC_Stop(); // STOP
return 0;
}
u8 MPU_Write_Byte(u8 reg,u8 data)
{
IIC_Start();
IIC_SendByte((MPU_ADDR<<1)|0);//
if(IIC_WaitAck()) //
{
IIC_Stop();
return 1;
}
IIC_SendByte(reg); //
IIC_WaitAck(); //
IIC_SendByte(data);//
if(IIC_WaitAck()) //ACK
{
IIC_Stop();
return 1;
}
IIC_Stop();
return 0;
}
u8 MPU_Read_Byte(u8 reg)
{
u8 res;
IIC_Start();
IIC_SendByte((MPU_ADDR<<1)|0);//
IIC_WaitAck(); //
IIC_SendByte(reg); //
IIC_WaitAck(); //
IIC_Start();
IIC_SendByte((MPU_ADDR<<1)|1);//
IIC_WaitAck(); //
res=IIC_ReadByte(0);//nACK
IIC_Stop(); // STOP
printf( " <%02X> " , res );
return res;
}
#endif // - OLD_CODE
// int main(void)
// int main_1(void)
int MPU6050_TEST(void)
{
short aacx,aacy,aacz; //
short gyrox,gyroy,gyroz; //
short temp; //
/*
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
Delay_Init();
USART_Printf_Init(115200);
// MPU_Init(); //MPU6050
// IIC_Init( 100000, 0xA0 );
IIC_Init( 100000, 0x68 );
// IIC_Init( 100000, 0x69 );
printf("\r\n\r\n: MPU6050 TEST : \r\n\r\n");
printf("- SystemClk : %d \r\n\r\n\r\n",SystemCoreClock);
*/
while( 1 )
{
temp = MPU_Get_Temperature(); //
MPU_Get_Accelerometer(&aacx,&aacy,&aacz); //
MPU_Get_Gyroscope(&gyrox,&gyroy,&gyroz); //
printf("\r\n Temperature:%d \r\n",temp);
Delay_Ms(500);
}
}
///
/**********************************************************************
*@Note:
AT24Cxx
READ EEPROM Start + 0xA0 + 8bit Data Address + Start + 0xA1 + Read Data + Stop.
WRITE EERPOM Start + 0xA0 + 8bit Data Address + Write Data + Stop.
*******************************************************************************/
/* EERPOM DATA ADDRESS Length Definition */
#define Address_8bit 0
#define Address_16bit 1
/* EERPOM DATA ADDRESS Length Selection */
#define Address_Lenth Address_8bit
//#define Address_Lenth Address_16bit
/* Global define */
#define SIZE sizeof(TEXT_Buffer)
/* Global Variable */
const u8 TEXT_Buffer[]={"CH32V00x I2C TEST"};
/*********************************************************************
* @fn IIC_Init
* @brief Initializes the IIC peripheral.
* @return none
*/
void IIC_Init(u32 bound, u16 address)
{
printf("> IIC_Init() : bound=%d , address=%02X :\r\n" , bound , address );
GPIO_InitTypeDef GPIO_InitStructure = {0};
I2C_InitTypeDef I2C_InitTSturcture = {0};
RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOC | RCC_APB2Periph_AFIO, ENABLE );
RCC_APB1PeriphClockCmd( RCC_APB1Periph_I2C1, ENABLE );
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_OD;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init( GPIOC, &GPIO_InitStructure );
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_OD;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init( GPIOC, &GPIO_InitStructure );
I2C_InitTSturcture.I2C_Mode = I2C_Mode_I2C;
I2C_InitTSturcture.I2C_OwnAddress1 = address;
I2C_InitTSturcture.I2C_ClockSpeed = bound;
I2C_InitTSturcture.I2C_DutyCycle = I2C_DutyCycle_2;
I2C_InitTSturcture.I2C_Ack = I2C_Ack_Enable;
I2C_InitTSturcture.I2C_AcknowledgedAddress = I2C_AcknowledgedAddress_7bit;
I2C_Init( I2C1, &I2C_InitTSturcture );
I2C_Cmd( I2C1, ENABLE );
I2C_AcknowledgeConfig( I2C1, ENABLE );
printf("< IIC_Init() .\r\n");
}
/*********************************************************************
* @fn AT24CXX_Init
* @brief Initializes AT24xx EEPROM.
* @return none
*/
void AT24CXX_Init(void)
{
IIC_Init( 100000, 0xA0 );
}
void MPU6050_Init(void)
{
IIC_Init( 100000, 0x68 );
}
/*********************************************************************
* @fn AT24CXX_ReadOneByte
* @brief Read one data from EEPROM.
* @param ReadAddr - Read first address.
* @return temp - Read data.
*/
u8 AT24CXX_ReadOneByte(u16 ReadAddr)
{
u8 temp=0;
while( I2C_GetFlagStatus( I2C1, I2C_FLAG_BUSY ) != RESET );
I2C_GenerateSTART( I2C1, ENABLE );
while( !I2C_CheckEvent( I2C1, I2C_EVENT_MASTER_MODE_SELECT ) );
// // I2C_Send7bitAddress( I2C1, 0XA0, I2C_Direction_Transmitter );
I2C_Send7bitAddress( I2C1, 0X68, I2C_Direction_Transmitter );
while( !I2C_CheckEvent( I2C1, I2C_EVENT_MASTER_TRANSMITTER_MODE_SELECTED ) );
// Send Address 8b / 16b : //
#if (Address_Lenth == Address_8bit)
I2C_SendData( I2C1, (u8)(ReadAddr&0x00FF) );
while( !I2C_CheckEvent( I2C1, I2C_EVENT_MASTER_BYTE_TRANSMITTED ) );
#elif (Address_Lenth == Address_16bit)
I2C_SendData( I2C1, (u8)(ReadAddr>>8) );
while( !I2C_CheckEvent( I2C1, I2C_EVENT_MASTER_BYTE_TRANSMITTED ) );
I2C_SendData( I2C1, (u8)(ReadAddr&0x00FF) );
while( !I2C_CheckEvent( I2C1, I2C_EVENT_MASTER_BYTE_TRANSMITTED ) );
#endif
I2C_GenerateSTART( I2C1, ENABLE );
while( !I2C_CheckEvent( I2C1, I2C_EVENT_MASTER_MODE_SELECT ) );
// // I2C_Send7bitAddress( I2C1, 0XA0, I2C_Direction_Receiver );
I2C_Send7bitAddress( I2C1, 0X68, I2C_Direction_Receiver );
while( !I2C_CheckEvent( I2C1, I2C_EVENT_MASTER_RECEIVER_MODE_SELECTED ) );
while( I2C_GetFlagStatus( I2C1, I2C_FLAG_RXNE ) == RESET )
I2C_AcknowledgeConfig( I2C1, DISABLE );
temp = I2C_ReceiveData( I2C1 );
I2C_GenerateSTOP( I2C1, ENABLE );
return temp;
}
/*********************************************************************
* @fn AT24CXX_WriteOneByte
* @brief Write one data to EEPROM.
* @param WriteAddr - Write frist address.
* @return DataToWrite - Write data.
*/
void AT24CXX_WriteOneByte(u16 WriteAddr, u8 DataToWrite)
{
while( I2C_GetFlagStatus( I2C1, I2C_FLAG_BUSY ) != RESET );
I2C_GenerateSTART( I2C1, ENABLE );
while( !I2C_CheckEvent( I2C1, I2C_EVENT_MASTER_MODE_SELECT ) );
// // I2C_Send7bitAddress( I2C1, 0XA0, I2C_Direction_Transmitter );
I2C_Send7bitAddress( I2C1, 0X68, I2C_Direction_Transmitter );
while( !I2C_CheckEvent( I2C1, I2C_EVENT_MASTER_TRANSMITTER_MODE_SELECTED ) );
// Send Address 8b / 16b : //
#if (Address_Lenth == Address_8bit)
I2C_SendData( I2C1, (u8)(WriteAddr&0x00FF) );
while( !I2C_CheckEvent( I2C1, I2C_EVENT_MASTER_BYTE_TRANSMITTED ) );
#elif (Address_Lenth == Address_16bit)
I2C_SendData( I2C1, (u8)(WriteAddr>>8) );
while( !I2C_CheckEvent( I2C1, I2C_EVENT_MASTER_BYTE_TRANSMITTED ) );
I2C_SendData( I2C1, (u8)(WriteAddr&0x00FF) );
while( !I2C_CheckEvent( I2C1, I2C_EVENT_MASTER_BYTE_TRANSMITTED ) );
#endif
if( I2C_GetFlagStatus( I2C1, I2C_FLAG_TXE ) != RESET )
{
I2C_SendData( I2C1, DataToWrite );
}
while( !I2C_CheckEvent( I2C1, I2C_EVENT_MASTER_BYTE_TRANSMITTED ) );
I2C_GenerateSTOP( I2C1, ENABLE );
}
/*********************************************************************
* @fn AT24CXX_Read
* @brief Read multiple data from EEPROM.
* @param ReadAddr - Read frist address. (AT24c02: 0~255)
* pBuffer - Read data.
* NumToRead - Data number.
* @return none
*/
void AT24CXX_Read(u16 ReadAddr, u8 *pBuffer, u16 NumToRead)
{
while( NumToRead )
{
* pBuffer ++ = AT24CXX_ReadOneByte( ReadAddr ++ );
NumToRead -- ;
}
}
/*********************************************************************
* @fn AT24CXX_Write
* @brief Write multiple data to EEPROM.
* @param WriteAddr - Write frist address. (AT24c02: 0~255)
* pBuffer - Write data.
* NumToWrite - Data number.
* @return none
*/
void AT24CXX_Write(u16 WriteAddr, u8 *pBuffer, u16 NumToWrite)
{
while(NumToWrite--)
{
AT24CXX_WriteOneByte( WriteAddr , * pBuffer );
WriteAddr ++ ;
pBuffer ++ ;
Delay_Ms(2);
}
}
// // void MPU6050_Write(u16 WriteAddr, u8 *pBuffer, u16 NumToWrite)
void MPU6050_Write()
{
printf("> MPU6050_Write() : \r\n");
// // MPU_Write_Byte(MPU_PWR_MGMT1_REG,0X80); //MPU6050
AT24CXX_WriteOneByte(MPU_PWR_MGMT1_REG,0X80); //MPU6050
Delay_Ms(100);
// // MPU_Write_Byte(MPU_PWR_MGMT1_REG,0X00); //MPU6050
AT24CXX_WriteOneByte(MPU_PWR_MGMT1_REG,0X00); //MPU6050
// Delay_Ms(1);
printf("= MPU6050_Write() -> MPU_Set_Gyro_Fsr() \r\n");
// // MPU_Set_Gyro_Fsr(3); //+-2000dps
AT24CXX_WriteOneByte( MPU_ACCEL_CFG_REG , 3 << 3 ) ;
// Delay_Ms(1);
printf("= MPU6050_Write() -> MPU_Set_Accel_Fsr() \r\n");
MPU_Set_Accel_Fsr(0); //+-2g
printf("= MPU6050_Write() -> MPU_Set_Rate() \r\n");
MPU_Set_Rate(50); //50Hz
printf("= MPU6050_Write() ... \r\n");
// // MPU_Write_Byte(MPU_INT_EN_REG,0X00); //
AT24CXX_WriteOneByte(MPU_INT_EN_REG,0X00); //
// // MPU_Write_Byte(MPU_USER_CTRL_REG,0X00); //I2C
AT24CXX_WriteOneByte(MPU_USER_CTRL_REG,0X00); //I2C
// // MPU_Write_Byte(MPU_FIFO_EN_REG,0X00); //FIFO
AT24CXX_WriteOneByte(MPU_FIFO_EN_REG,0X00); //FIFO
// // MPU_Write_Byte(MPU_INTBP_CFG_REG,0X80); //INT
AT24CXX_WriteOneByte(MPU_INTBP_CFG_REG,0X80); //INT
// // int res ;
// // res = MPU_Read_Byte(MPU_DEVICE_ID_REG);
AT24CXX_ReadOneByte( MPU_DEVICE_ID_REG );
// // if( res == MPU_ADDR ) // ID
{
// // MPU_Write_Byte(MPU_PWR_MGMT1_REG,0X01); // CLKSEL,PLL X
AT24CXX_WriteOneByte(MPU_PWR_MGMT1_REG,0X01); // CLKSEL,PLL X
// // MPU_Write_Byte(MPU_PWR_MGMT2_REG,0X00); //
AT24CXX_WriteOneByte(MPU_PWR_MGMT2_REG,0X00); //
MPU_Set_Rate(50); // 50Hz
}
// else
// return 1;
// return 0;
printf("< MPU6050_Write() . \r\n");
}
/*********************************************************************
* @fn main
* @brief Main program.
* @return none
*/
int main(void)
{
// u8 data[SIZE];
Delay_Init();
USART_Printf_Init(115200);
// // printf(": eeprom 24Cxx :\r\n");
printf("\r\n\r\n: MPU6050 003 :\r\n");
printf("- SystemClk:%d\r\n",SystemCoreClock);
// // AT24CXX_Init();
MPU6050_Init();
/*
printf("Start Write 24Cxx....\r\n");
AT24CXX_Write(100,(u8*)TEXT_Buffer,SIZE);
printf("24Cxx Write Success!\r\n");
Delay_Ms(500);
printf("Start Read 24Cxx....\r\n");
AT24CXX_Read(100,data,SIZE);
printf("The Data Read Is: \r\n");
printf("%s\r\n", data);
*/
MPU6050_Write();
while( 1 )
{
printf("> mpu6050 Test ... \r\n");
MPU6050_TEST();
Delay_Ms(500);
}
}
///
If it helps , the Code File and the entire Project is attached :
- Any help would be appreciated !
-
If this helps - without the old commented code :Code: [Select]
/*
Create project as : ch32v003 - f4p6 (- Not 103/203)
- copy main.c from /EVT/EXAM/.../I2C_mpu6050/User/
FAQs :
- Typo used id 0x58 , should be 0x68
- Wrong I2C pins for 003 : not PA1=SDA PA2=SCL , should be PC1=SDA PC2=SCL
The VCC and GND pins of the CH32V103 development board are connected to the VCC and GND pins of the MPU6050 module.
PC1 = SDA : The PC1 pin of the CH32V003 development board is connected to the SDA pin of the MPU6050 module
PC2 = SCL : The PC2 pin of the CH32V003 development board is connected to the SCL pin of the MPU6050 module
//The VCC and GND pins of the CH32V103 development board are connected to the VCC and GND pins of the MPU6050 module.
// PA1 = SDA : The PA1 pin of the CH32V103 development board is connected to the SDA pin of the MPU6050 module
// PA2 = SCL : The PA2 pin of the CH32V103 development board is connected to the SCL pin of the MPU6050 module
Mpu6050 : Id Address = 0x68 wrt , 0x69 rd
- Compiles Downloads , Returns same data : Temp=175, AX=-11823 , AY=-11823 , AZ=-11823 , GX=-11823 , AGY=-11823 , GZ=-11823
- TX = PA9
- RX = PA10
*/
///
#include "debug.h"
//
u8 AT24CXX_ReadOneByte( u16 ReadAddr ) ;
void AT24CXX_WriteOneByte( u16 WriteAddr, u8 DataToWrite ) ;
void AT24CXX_Read( u16 ReadAddr, u8 *pBuffer, u16 NumToRead ) ;
void AT24CXX_Write( u16 WriteAddr, u8 *pBuffer, u16 NumToWrite ) ;
///
#ifndef __MPU6050_H
#define __MPU6050_H
// // #include "iic.h"
// #include "debug.h"
//MPU6050 AD0
/*
#define MPU_AD0_H GPIO_SetBits( GPIOA,GPIO_Pin_15) // SDA
#define MPU_AD0_L GPIO_ResetBits(GPIOA,GPIO_Pin_15) // SDA
*/
// 003-c8t6 : - SCL=A6 , SDA=A7 :
#define MPU_AD0_H GPIO_SetBits( GPIOC,GPIO_Pin_1) // SDA
#define MPU_AD0_L GPIO_ResetBits(GPIOC,GPIO_Pin_1) // SDA
/*
// 203-c8t6 : - SCL=C2 , SDA=C1 :
#define MPU_AD0_H GPIO_SetBits( GPIOC,GPIO_Pin_1) // SDA
#define MPU_AD0_L GPIO_ResetBits(GPIOC,GPIO_Pin_1) // SDA
*/
#define MPU_ACCEL_OFFS_REG 0X06 //accel_offs
#define MPU_PROD_ID_REG 0X0C //prod id
#define MPU_SELF_TESTX_REG 0X0D //X
#define MPU_SELF_TESTY_REG 0X0E //Y
#define MPU_SELF_TESTZ_REG 0X0F //Z
#define MPU_SELF_TESTA_REG 0X10 //A
#define MPU_SAMPLE_RATE_REG 0X19 //
#define MPU_CFG_REG 0X1A //
#define MPU_GYRO_CFG_REG 0X1B //
#define MPU_ACCEL_CFG_REG 0X1C //
#define MPU_MOTION_DET_REG 0X1F //
#define MPU_FIFO_EN_REG 0X23 //FIFO
#define MPU_I2CMST_CTRL_REG 0X24 //IIC
#define MPU_I2CSLV0_ADDR_REG 0X25 //IIC
#define MPU_I2CSLV0_REG 0X26 //IIC
#define MPU_I2CSLV0_CTRL_REG 0X27 //IIC
#define MPU_I2CSLV1_ADDR_REG 0X28 //IIC
#define MPU_I2CSLV1_REG 0X29 //IIC
#define MPU_I2CSLV1_CTRL_REG 0X2A //IIC
#define MPU_I2CSLV2_ADDR_REG 0X2B //IIC2
#define MPU_I2CSLV2_REG 0X2C //IIC2
#define MPU_I2CSLV2_CTRL_REG 0X2D //IIC2
#define MPU_I2CSLV3_ADDR_REG 0X2E //IIC3
#define MPU_I2CSLV3_REG 0X2F //IIC3
#define MPU_I2CSLV3_CTRL_REG 0X30 //IIC3
#define MPU_I2CSLV4_ADDR_REG 0X31 //IIC4
#define MPU_I2CSLV4_REG 0X32 //IIC4
#define MPU_I2CSLV4_DO_REG 0X33 //IIC4
#define MPU_I2CSLV4_CTRL_REG 0X34 //IIC4
#define MPU_I2CSLV4_DI_REG 0X35 //IIC4
#define MPU_I2CMST_STA_REG 0X36 //IIC
#define MPU_INTBP_CFG_REG 0X37 // /
#define MPU_INT_EN_REG 0X38 //
#define MPU_INT_STA_REG 0X3A //
#define MPU_ACCEL_XOUTH_REG 0X3B //X 8
#define MPU_ACCEL_XOUTL_REG 0X3C //X 8
#define MPU_ACCEL_YOUTH_REG 0X3D //Y 8
#define MPU_ACCEL_YOUTL_REG 0X3E //Y 8
#define MPU_ACCEL_ZOUTH_REG 0X3F //Z 8
#define MPU_ACCEL_ZOUTL_REG 0X40 //Z 8
#define MPU_TEMP_OUTH_REG 0X41 //
#define MPU_TEMP_OUTL_REG 0X42 //8
#define MPU_GYRO_XOUTH_REG 0X43 //X 8
#define MPU_GYRO_XOUTL_REG 0X44 //X 8
#define MPU_GYRO_YOUTH_REG 0X45 //Y 8
#define MPU_GYRO_YOUTL_REG 0X46 //Y 8
#define MPU_GYRO_ZOUTH_REG 0X47 //Z 8
#define MPU_GYRO_ZOUTL_REG 0X48 //Z 8
#define MPU_I2CSLV0_DO_REG 0X63 //IIC0
#define MPU_I2CSLV1_DO_REG 0X64 //IIC1
#define MPU_I2CSLV2_DO_REG 0X65 //IIC2
#define MPU_I2CSLV3_DO_REG 0X66 //IIC3
#define MPU_I2CMST_DELAY_REG 0X67 //IIC
#define MPU_SIGPATH_RST_REG 0X68 //
#define MPU_MDETECT_CTRL_REG 0X69 //
#define MPU_USER_CTRL_REG 0X6A //
#define MPU_PWR_MGMT1_REG 0X6B //1
#define MPU_PWR_MGMT2_REG 0X6C //2
#define MPU_FIFO_CNTH_REG 0X72 //FIFO
#define MPU_FIFO_CNTL_REG 0X73 //FIFO
#define MPU_FIFO_RW_REG 0X74 //FIFO
#define MPU_DEVICE_ID_REG 0X75 //ID
#define MPU_ADDR 0X68
//#define MPU_READ 0XD1
//#define MPU_WRITE 0XD0
u8 MPU_Init(void); //MPU6050
u8 MPU_Write_Len(u8 addr,u8 reg,u8 len,u8 *buf);//IIC
u8 MPU_Read_Len(u8 addr,u8 reg,u8 len,u8 *buf); //IIC
u8 MPU_Write_Byte(u8 reg,u8 data); //IIC
u8 MPU_Read_Byte(u8 reg); //IIC
u8 MPU_Set_Gyro_Fsr(u8 fsr);
u8 MPU_Set_Accel_Fsr(u8 fsr);
u8 MPU_Set_LPF(u16 lpf);
u8 MPU_Set_Rate(u16 rate);
u8 MPU_Set_Fifo(u8 sens);
short MPU_Get_Temperature(void);
u8 MPU_Get_Gyroscope(short *gx,short *gy,short *gz);
u8 MPU_Get_Accelerometer(short *ax,short *ay,short *az);
#endif
///
//fsr:0,250dps;1,500dps;2,1000dps;3,2000dps
u8 MPU_Set_Gyro_Fsr(u8 fsr)
{
AT24CXX_WriteOneByte( MPU_GYRO_CFG_REG , fsr << 3 ) ;
return( 0 );
}
u8 MPU_Set_Accel_Fsr(u8 fsr)
{
AT24CXX_WriteOneByte( MPU_ACCEL_CFG_REG , fsr << 3 ) ;
return( 0 );
}
u8 MPU_Set_LPF(u16 lpf)
{
u8 data = 0;
if( lpf >= 188 )
data=1;
else if( lpf >= 98 )
data=2;
else if( lpf >= 42 )
data=3;
else if( lpf >= 20 )
data=4;
else if( lpf >= 10 )
data=5;
else
data = 6;
AT24CXX_WriteOneByte( MPU_CFG_REG , data ) ;
return(0);
}
u8 MPU_Set_Rate(u16 rate)
{
u8 data;
if(rate > 1000)
rate = 1000;
if(rate < 4)
rate = 4;
data = 1000 / rate - 1 ;
AT24CXX_WriteOneByte( MPU_SAMPLE_RATE_REG , data ); //
return MPU_Set_LPF( rate / 2 ); //LPF
}
short MPU_Get_Temperature(void)
{
u8 buf[2];
short raw;
float temp;
AT24CXX_Read( MPU_TEMP_OUTH_REG , buf , 2 );
raw = ((u16)buf[0]<<8) | buf[1];
temp = 36.53 + ((double)raw) / 340;
return( temp * 100 );
}
u8 MPU_Get_Gyroscope(short *gx,short *gy,short *gz)
{
u8 buf[6],res = 0 ;
AT24CXX_Read( MPU_GYRO_XOUTH_REG , buf , 6 );
*gx = ((u16)buf[0]<<8) | buf[1];
*gy = ((u16)buf[2]<<8) | buf[3];
*gz = ((u16)buf[4]<<8) | buf[5];
printf("GYRO : X=%d , Y=%d , Z=%d \r\n",*gx,*gy,*gz);
return res;;
}
u8 MPU_Get_Accelerometer(short *ax,short *ay,short *az)
{
u8 buf[6] , res = 0 ;
AT24CXX_Read( MPU_ACCEL_XOUTH_REG , buf , 6 );
*ax = ((u16)buf[0]<<8) | buf[1];
*ay = ((u16)buf[2]<<8) | buf[3];
*az = ((u16)buf[4]<<8) | buf[5];
printf("ACC : X=%d , Y=%d , Z=%d \r\n", *ax , *ay , *az );
return res;;
}
// int main(void)
// int main_1(void)
int MPU6050_TEST(void)
{
short aacx,aacy,aacz; //
short gyrox,gyroy,gyroz; //
short temp; //
while( 1 )
{
temp = MPU_Get_Temperature(); //
MPU_Get_Accelerometer(&aacx,&aacy,&aacz); //
MPU_Get_Gyroscope(&gyrox,&gyroy,&gyroz); //
printf("\r\n Temperature:%d \r\n",temp);
Delay_Ms(500);
}
}
///
/**********************************************************************
*@Note:
AT24Cxx
READ EEPROM Start + 0xA0 + 8bit Data Address + Start + 0xA1 + Read Data + Stop.
WRITE EERPOM Start + 0xA0 + 8bit Data Address + Write Data + Stop.
*******************************************************************************/
/* EERPOM DATA ADDRESS Length Definition */
#define Address_8bit 0
#define Address_16bit 1
/* EERPOM DATA ADDRESS Length Selection */
#define Address_Lenth Address_8bit
//#define Address_Lenth Address_16bit
/* Global define */
#define SIZE sizeof(TEXT_Buffer)
/* Global Variable */
const u8 TEXT_Buffer[]={"CH32V00x I2C TEST"};
/*********************************************************************
* @fn IIC_Init
* @brief Initializes the IIC peripheral.
* @return none
*/
void IIC_Init(u32 bound, u16 address)
{
printf("> IIC_Init() : bound=%d , address=%02X :\r\n" , bound , address );
GPIO_InitTypeDef GPIO_InitStructure = {0};
I2C_InitTypeDef I2C_InitTSturcture = {0};
RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOC | RCC_APB2Periph_AFIO, ENABLE );
RCC_APB1PeriphClockCmd( RCC_APB1Periph_I2C1, ENABLE );
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_OD;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init( GPIOC, &GPIO_InitStructure );
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_OD;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init( GPIOC, &GPIO_InitStructure );
I2C_InitTSturcture.I2C_Mode = I2C_Mode_I2C;
I2C_InitTSturcture.I2C_OwnAddress1 = address;
I2C_InitTSturcture.I2C_ClockSpeed = bound;
I2C_InitTSturcture.I2C_DutyCycle = I2C_DutyCycle_2;
I2C_InitTSturcture.I2C_Ack = I2C_Ack_Enable;
I2C_InitTSturcture.I2C_AcknowledgedAddress = I2C_AcknowledgedAddress_7bit;
I2C_Init( I2C1, &I2C_InitTSturcture );
I2C_Cmd( I2C1, ENABLE );
I2C_AcknowledgeConfig( I2C1, ENABLE );
printf("< IIC_Init() .\r\n");
}
/*********************************************************************
* @fn AT24CXX_Init
* @brief Initializes AT24xx EEPROM.
* @return none
*/
void MPU6050_Init(void)
{
IIC_Init( 100000, 0x68 );
}
/*********************************************************************
* @fn AT24CXX_ReadOneByte
* @brief Read one data from EEPROM.
* @param ReadAddr - Read first address.
* @return temp - Read data.
*/
u8 AT24CXX_ReadOneByte(u16 ReadAddr)
{
u8 temp=0;
while( I2C_GetFlagStatus( I2C1, I2C_FLAG_BUSY ) != RESET );
I2C_GenerateSTART( I2C1, ENABLE );
while( !I2C_CheckEvent( I2C1, I2C_EVENT_MASTER_MODE_SELECT ) );
I2C_Send7bitAddress( I2C1, 0X68, I2C_Direction_Transmitter );
while( !I2C_CheckEvent( I2C1, I2C_EVENT_MASTER_TRANSMITTER_MODE_SELECTED ) );
// Send Address 8b / 16b : //
#if (Address_Lenth == Address_8bit)
I2C_SendData( I2C1, (u8)(ReadAddr&0x00FF) );
while( !I2C_CheckEvent( I2C1, I2C_EVENT_MASTER_BYTE_TRANSMITTED ) );
#elif (Address_Lenth == Address_16bit)
I2C_SendData( I2C1, (u8)(ReadAddr>>8) );
while( !I2C_CheckEvent( I2C1, I2C_EVENT_MASTER_BYTE_TRANSMITTED ) );
I2C_SendData( I2C1, (u8)(ReadAddr&0x00FF) );
while( !I2C_CheckEvent( I2C1, I2C_EVENT_MASTER_BYTE_TRANSMITTED ) );
#endif
I2C_GenerateSTART( I2C1, ENABLE );
while( !I2C_CheckEvent( I2C1, I2C_EVENT_MASTER_MODE_SELECT ) );
I2C_Send7bitAddress( I2C1, 0X68, I2C_Direction_Receiver );
while( !I2C_CheckEvent( I2C1, I2C_EVENT_MASTER_RECEIVER_MODE_SELECTED ) );
while( I2C_GetFlagStatus( I2C1, I2C_FLAG_RXNE ) == RESET )
I2C_AcknowledgeConfig( I2C1, DISABLE );
temp = I2C_ReceiveData( I2C1 );
I2C_GenerateSTOP( I2C1, ENABLE );
return temp;
}
/*********************************************************************
* @fn AT24CXX_WriteOneByte
* @brief Write one data to EEPROM.
* @param WriteAddr - Write frist address.
* @return DataToWrite - Write data.
*/
void AT24CXX_WriteOneByte(u16 WriteAddr, u8 DataToWrite)
{
while( I2C_GetFlagStatus( I2C1, I2C_FLAG_BUSY ) != RESET );
I2C_GenerateSTART( I2C1, ENABLE );
while( !I2C_CheckEvent( I2C1, I2C_EVENT_MASTER_MODE_SELECT ) );
I2C_Send7bitAddress( I2C1, 0X68, I2C_Direction_Transmitter );
while( !I2C_CheckEvent( I2C1, I2C_EVENT_MASTER_TRANSMITTER_MODE_SELECTED ) );
// Send Address 8b / 16b : //
#if (Address_Lenth == Address_8bit)
I2C_SendData( I2C1, (u8)(WriteAddr&0x00FF) );
while( !I2C_CheckEvent( I2C1, I2C_EVENT_MASTER_BYTE_TRANSMITTED ) );
#elif (Address_Lenth == Address_16bit)
I2C_SendData( I2C1, (u8)(WriteAddr>>8) );
while( !I2C_CheckEvent( I2C1, I2C_EVENT_MASTER_BYTE_TRANSMITTED ) );
I2C_SendData( I2C1, (u8)(WriteAddr&0x00FF) );
while( !I2C_CheckEvent( I2C1, I2C_EVENT_MASTER_BYTE_TRANSMITTED ) );
#endif
if( I2C_GetFlagStatus( I2C1, I2C_FLAG_TXE ) != RESET )
{
I2C_SendData( I2C1, DataToWrite );
}
while( !I2C_CheckEvent( I2C1, I2C_EVENT_MASTER_BYTE_TRANSMITTED ) );
I2C_GenerateSTOP( I2C1, ENABLE );
}
/*********************************************************************
* @fn AT24CXX_Read
* @brief Read multiple data from EEPROM.
* @param ReadAddr - Read frist address. (AT24c02: 0~255)
* pBuffer - Read data.
* NumToRead - Data number.
* @return none
*/
void AT24CXX_Read(u16 ReadAddr, u8 *pBuffer, u16 NumToRead)
{
while( NumToRead )
{
* pBuffer ++ = AT24CXX_ReadOneByte( ReadAddr ++ );
NumToRead -- ;
}
}
/*********************************************************************
* @fn AT24CXX_Write
* @brief Write multiple data to EEPROM.
* @param WriteAddr - Write frist address. (AT24c02: 0~255)
* pBuffer - Write data.
* NumToWrite - Data number.
* @return none
*/
void AT24CXX_Write(u16 WriteAddr, u8 *pBuffer, u16 NumToWrite)
{
while(NumToWrite--)
{
AT24CXX_WriteOneByte( WriteAddr , * pBuffer );
WriteAddr ++ ;
pBuffer ++ ;
Delay_Ms(2);
}
}
// // void MPU6050_Write(u16 WriteAddr, u8 *pBuffer, u16 NumToWrite)
void MPU6050_Write()
{
printf("> MPU6050_Write() : \r\n");
AT24CXX_WriteOneByte(MPU_PWR_MGMT1_REG,0X80); //MPU6050
Delay_Ms(100);
AT24CXX_WriteOneByte(MPU_PWR_MGMT1_REG,0X00); //MPU6050
printf("= MPU6050_Write() -> MPU_Set_Gyro_Fsr() \r\n");
MPU_Set_Gyro_Fsr(3); //+-2000dps
MPU_Set_Accel_Fsr(0); //+-2g
MPU_Set_Rate(50); //50Hz
printf("= MPU6050_Write() ... \r\n");
AT24CXX_WriteOneByte(MPU_INT_EN_REG,0X00); //
AT24CXX_WriteOneByte(MPU_USER_CTRL_REG,0X00); //I2C
AT24CXX_WriteOneByte(MPU_FIFO_EN_REG,0X00); //FIFO
AT24CXX_WriteOneByte(MPU_INTBP_CFG_REG,0X80); //INT
AT24CXX_ReadOneByte( MPU_DEVICE_ID_REG );
AT24CXX_WriteOneByte(MPU_PWR_MGMT1_REG,0X01); // CLKSEL,PLL X
AT24CXX_WriteOneByte(MPU_PWR_MGMT2_REG,0X00); //
MPU_Set_Rate(50); // 50Hz
printf("< MPU6050_Write() . \r\n");
}
/*********************************************************************
* @fn main
* @brief Main program.
* @return none
*/
int main(void)
{
Delay_Init();
USART_Printf_Init(115200);
printf("\r\n\r\n: MPU6050 003 :\r\n");
printf("- SystemClk:%d\r\n",SystemCoreClock);
MPU6050_Init();
Delay_Ms(500);
;
MPU6050_Write();
Delay_Ms(500);
while( 1 )
{
printf("> mpu6050 Test ... \r\n");
MPU6050_TEST();
Delay_Ms(500);
}
}
/// -
I added an I2C Bus Scanner.
But it does not see the Mpu6060.
- Is the prolem that :
-- the I2C Bus Scanner code ,
-- or the mpu6050 wiring to Ch32v003f4p6 board ,
-- or does the Board Not support I2C - C1=SDA , C2=SCL ?
This is the Board :
-- Reset -> Reset PD7 pin
-- LED <- PD4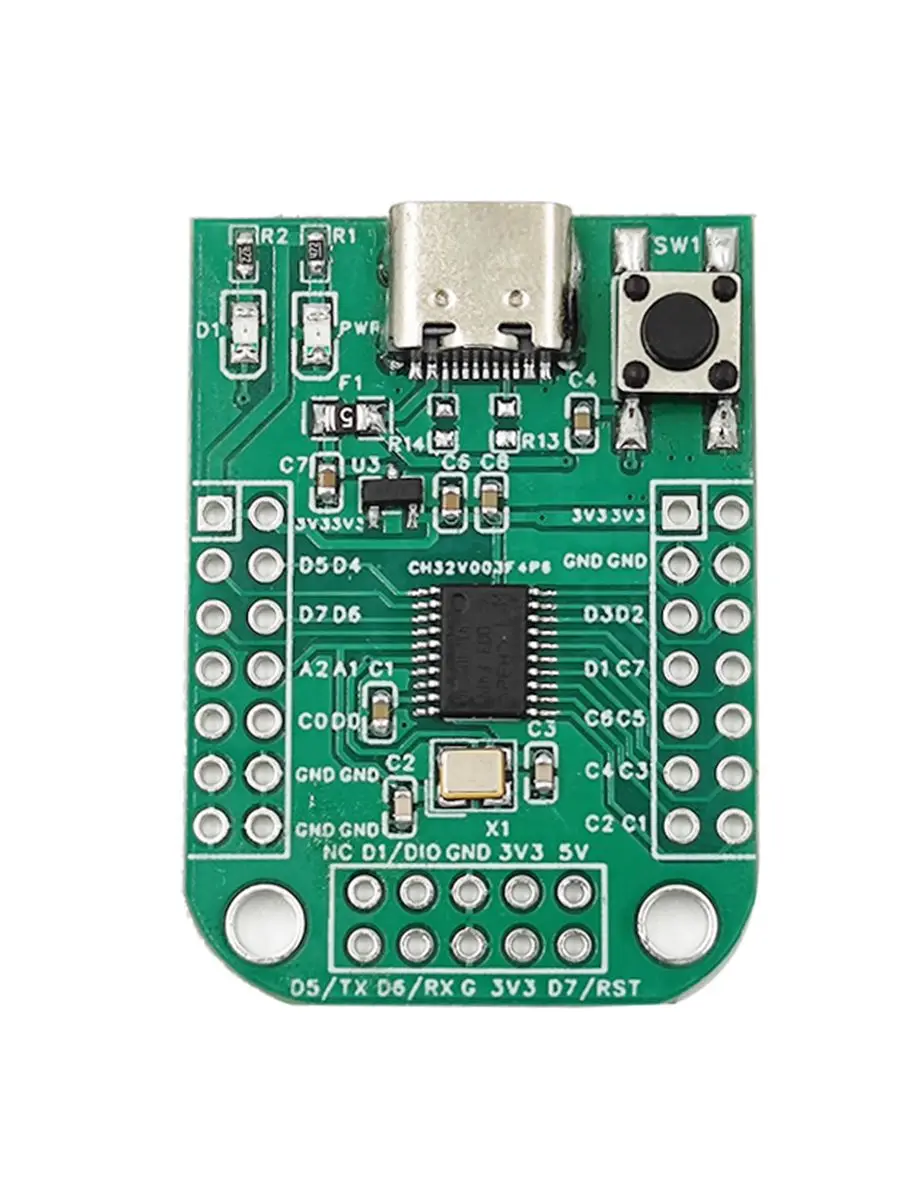
This is the schematic (except mine has a 10pin DIO Header) :
https://taunoerik.art/wp-content/uploads/2023/10/screenshot-from-2023-10-22-08-52-05.png
Code :Code: [Select]
/*
*/
/*
*@Note
*Multiprocessor communication mode routine:
*Master:USART1_Tx(PD5)\USART1_Rx(PD6).
*This routine demonstrates that USART1 receives the data sent by CH341 and inverts
*it and sends it (baud rate 115200).
*
*Hardware connection:PD5 -- Rx
* PD6 -- Tx
*
*/
#include "debug.h"
#include <ch32v00x_i2c.h>
#include <ch32v00x_rcc.h>
/* Global define */
/* Global Variable */
vu8 val;
/*********************************************************************
* @fn USARTx_CFG
*
* @brief Initializes the USART2 & USART3 peripheral.
*
* @return none
*/
void USARTx_CFG(void)
{
GPIO_InitTypeDef GPIO_InitStructure = {0};
USART_InitTypeDef USART_InitStructure = {0};
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOD | RCC_APB2Periph_USART1, ENABLE);
/* USART1 TX-->D.5 RX-->D.6 */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_Init(GPIOD, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(GPIOD, &GPIO_InitStructure);
USART_InitStructure.USART_BaudRate = 115200;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_Parity = USART_Parity_No;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode = USART_Mode_Tx | USART_Mode_Rx;
USART_Init(USART1, &USART_InitStructure);
USART_Cmd(USART1, ENABLE);
}
//
/*
*@Note
7-bit addressing mode, master/slave mode, transceiver routine:
I2C1_SCL(PC2)\I2C1_SDA(PC1).
This routine demonstrates that Master sends and Slave receives.
Note: The two boards download the Master and Slave programs respectively,
and power on at the same time.
Hardware connection:
PC2 -- PC2
PC1 -- PC1
*/
#include "debug.h"
/* I2C Mode Definition */
#define HOST_MODE 0
#define SLAVE_MODE 1
/* I2C Communication Mode Selection */
#define I2C_MODE HOST_MODE
//#define I2C_MODE SLAVE_MODE
/* Global define */
#define Size 6
#define RXAdderss 0x02
#define TxAdderss 0x02
/* Global Variable */
u8 TxData[Size] = { 0x01, 0x02, 0x03, 0x04, 0x05, 0x06 };
u8 RxData[5][Size];
/*********************************************************************
* @fn IIC_Init
* @brief Initializes the IIC peripheral.
* @return none
*/
void IIC_Init(u32 bound, u16 address)
{
GPIO_InitTypeDef GPIO_InitStructure = {0};
I2C_InitTypeDef I2C_InitTSturcture = {0};
RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOC | RCC_APB2Periph_AFIO, ENABLE );
RCC_APB1PeriphClockCmd( RCC_APB1Periph_I2C1, ENABLE );
/// SDA : ///
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_OD;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init( GPIOC, &GPIO_InitStructure );
/// SCL : ///
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_OD;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init( GPIOC, &GPIO_InitStructure );
I2C_InitTSturcture.I2C_Mode = I2C_Mode_I2C;
I2C_InitTSturcture.I2C_OwnAddress1 = address;
I2C_InitTSturcture.I2C_ClockSpeed = bound;
I2C_InitTSturcture.I2C_DutyCycle = I2C_DutyCycle_16_9;
I2C_InitTSturcture.I2C_Ack = I2C_Ack_Enable;
I2C_InitTSturcture.I2C_AcknowledgedAddress = I2C_AcknowledgedAddress_7bit;
I2C_Init( I2C1, &I2C_InitTSturcture );
I2C_Cmd( I2C1, ENABLE );
// #if (I2C_MODE == HOST_MODE)
I2C_AcknowledgeConfig( I2C1, ENABLE );
// #endif
}
//
/*********************************************************************
* @fn main
* @brief Main program.
* @return none
*/
int main(void)
{
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
SystemCoreClockUpdate();
Delay_Init();
USART_Printf_Init(115200);
printf("\r\n\r\n: I2C_MPU6050_003_2 : \r\n");
printf(" SystemClk:%d\r\n",SystemCoreClock);
printf( "ChipID:%08x\r\n", DBGMCU_GetCHIPID() );
USARTx_CFG();
//
// u8 i = 0;
u8 j = 0;
// u8 p = 0;
u8 res ;
// __IO uint32_t i2creg=0 ;
__IO uint32_t i2cxbase=0 , i2cxbase1=0 , i2cxbase2=0 ;
i2cxbase = (uint32_t)I2C1 ; // = (uint32_t)I2Cx;
// i2creg = I2C_FLAG >> 28;
// I2C_FLAG &= FLAG_Mask;
// if(i2creg != 0)
// {
// i2cxbase += 0x18;
i2cxbase1 = i2cxbase + 0x14;
// }
// else
// {
// I2C_FLAG = (uint32_t)(I2C_FLAG >> 16);
// i2cxbase += 0x18;
i2cxbase2 = i2cxbase + 0x18;
// }
printf("> main(): IIC mode\r\n");
IIC_Init( 80000, TxAdderss);
while( 1 )
{
printf("= main(): for(0..5) \r\n");
for( j=0x01; j <= 0x7F ; j++ )
{
while( I2C_GetFlagStatus( I2C1, I2C_FLAG_BUSY ) != RESET );
printf("= main(): ->I2C:Start() \r\n");
I2C_GenerateSTART( I2C1, ENABLE );
while( ! I2C_CheckEvent( I2C1, I2C_EVENT_MASTER_MODE_SELECT ) ) {}
printf(" = main(): ->I2C:SendAdrId() = x%02X \r\n" , j );
// I2C_Send7bitAddress( I2C1, 0x02, I2C_Direction_Transmitter );
// I2C_Send7bitAddress( I2C1, 0x68, I2C_Direction_Transmitter );
I2C_Send7bitAddress( I2C1, j, I2C_Direction_Transmitter );
// while( ! I2C_CheckEvent( I2C1, I2C_EVENT_MASTER_TRANSMITTER_MODE_SELECTED ) ) {}
res = I2C_CheckEvent( I2C1, I2C_EVENT_MASTER_TRANSMITTER_MODE_SELECTED ) ;
printf(" => MTM=%d " , res );
res = I2C_CheckEvent( I2C1, I2C_Direction_Transmitter ) ;
printf(", DirT=%d " , res );
Delay_Ms(1);
res = I2C_CheckEvent( I2C1, I2C_EVENT_MASTER_TRANSMITTER_MODE_SELECTED ) ;
printf(", MTM=%d " , res );
// res = I2C_GetFlagStatus( I2C1, I2C_EVENT_MASTER_BYTE_TRANSMITTED ) ;
res = (*(__IO uint32_t *) i2cxbase1);
printf(", St=%d " , res );
res = (*(__IO uint32_t *) i2cxbase2);
printf("%d " , res );
/*
while( I2C_GetFlagStatus( I2C1, I2C_FLAG_TXE ) == RESET ) {}
I2C_SendData( I2C1, TxData[i] );
while( ! I2C_CheckEvent( I2C1, I2C_EVENT_MASTER_BYTE_TRANSMITTED ) ) {}
*/
printf("\r\n= main(): ->I2C:Stop() \r\n");
I2C_GenerateSTOP( I2C1, ENABLE );
// res = I2C_GetFlagStatus( I2C1, I2C_EVENT_MASTER_TRANSMITTER_MODE_SELECTED ) ;
res = (*(__IO uint32_t *) i2cxbase1);
printf(" , St=%d " , res );
res = (*(__IO uint32_t *) i2cxbase2);
printf("%d \r\n" , res );
Delay_Ms(100);
}
printf("\r\n---\r\n\r\n");
Delay_Ms(1000);
} // - while(1) .
//
while( 1 )
{
;
}
//
}
///
Also added to my github :
https://github.com/jlsilicon/Ch32v003/blob/main/Ch32v003/I2C_Bus_Scanner/User/main.c
-
Do you have pull up resistors on I2C bus? I saw no one in schematic.
-
MPU6050 board HW-123 has built in Pullup resistors.
Yeah thanks, I did check that.
https://europe1.discourse-cdn.com/arduino/optimized/4X/7/4/6/74631f82563988409a5cddf32fdacbfee3e4707f_2_690x403.jpeg
-
If you've checked everything else, the likely issue is just the slave address. You're using 0x68, which is the 7-bit address. But I2C functions of the SDK (similar to the STM32 HAL, which WCH has gotten its inspiration from) take an 8-bit address IIRC (so the byte that it will send over I2C). In your case, you'd need to shift the address left by 1 bit, like 0x68 << 1. Haven't used the CH32V003, but try this and let me know.
-
No, still no result.
// I2C_Send7bitAddress( I2C1, 0x68, I2C_Direction_Transmitter );
I2C_Send7bitAddress( I2C1, (0x68>>1), I2C_Direction_Transmitter );
: I2C_MPU6050_003_2 :
SystemClk:48000000
ChipID:00300500
> main(): IIC mode
= main(): for(0..5)
= main(): ->I2C:Start()
= main(): ->I2C:SendAdrId()
-
Which way is left?
-
Why shift left if its sent 7bit.
I thought you would shift right : x68 >> 1 => 7bit
oh - ok got it !
You are right that fixed it.
Thx !
Below is the output while twisting the mpu6050 around.
- a little flakey with connection - probably loose wire.
Output :Code: [Select]
: MPU6050 003 :
- SystemClk:48000000
> IIC_Init() : bound=100000 , address=68 :
< IIC_Init() .
> MPU6050_Write() :
= MPU6050_Write() -> MPU_Set_Gyro_Fsr()
= MPU6050_Write() -> MPU_Set_Accel_Fsr()
= MPU6050_Write() -> MPU_Set_Rate()
= MPU6050_Write() ...
< MPU6050_Write() .
> mpu6050 Test ...
ACC : X=17228 , Y=-490 , Z=1082
GYRO : X=-363 , Y=-81 , Z=-141
Temperature:2745
ACC : X=17336 , Y=-450 , Z=1076
GYRO : X=-385 , Y=-89 , Z=-232
Temperature:2752
ACC : X=17652 , Y=-666 , Z=1096
GYRO : X=-953 , Y=-364 , Z=-789
Temperature:2760
ACC : X=17196 , Y=-442 , Z=1074
GYRO : X=-334 , Y=-30 , Z=-71
Temperature:2764
ACC : X=17170 , Y=2434 , Z=1196
GYRO : X=-788 , Y=-640 , Z=-5729
Temperature:2766
ACC : X=15506 , Y=6944 , Z=1336
GYRO : X=-1266 , Y=-315 , Z=-4543
Temperature:2770
ACC : X=14536 , Y=8802 , Z=1432
GYRO : X=-326 , Y=53 , Z=-2003
Temperature:2755
ACC : X=17648 , Y=-1382 , Z=-2266
GYRO : X=98 , Y=-879 , Z=-431
Temperature:2765
ACC : X=17158 , Y=-480 , Z=-4640
GYRO : X=-238 , Y=-2639 , Z=-459
Temperature:2771
ACC : X=16138 , Y=-938 , Z=-7282
GYRO : X=537 , Y=-3935 , Z=-489
Temperature:2773
ACC : X=13872 , Y=-1016 , Z=-10700
GYRO : X=-203 , Y=-2806 , Z=-1125
Temperature:2776
ACC : X=12804 , Y=-118 , Z=-12634
GYRO : X=-376 , Y=-1719 , Z=-1261
Temperature:2779
ACC : X=15312 , Y=-880 , Z=-8602
GYRO : X=805 , Y=6467 , Z=1711
Temperature:2783
ACC : X=15758 , Y=-3340 , Z=-5560
GYRO : X=-198 , Y=-438 , Z=1705
Temperature:2785
ACC : X=16772 , Y=-2438 , Z=-5098
GYRO : X=339 , Y=2083 , Z=1109
Temperature:2786
ACC : X=16914 , Y=-3206 , Z=-2504
GYRO : X=-550 , Y=764 , Z=-183
Temperature:2789
ACC : X=17258 , Y=-3142 , Z=-3218
GYRO : X=-353 , Y=-206 , Z=-299
Temperature:2794
ACC : X=17126 , Y=-2578 , Z=-2918
GYRO : X=-1507 , Y=-640 , Z=-1084
Temperature:2799
ACC : X=17176 , Y=736 , Z=-2528
GYRO : X=-971 , Y=-499 , Z=-2939
Temperature:2802
ACC : X=17278 , Y=2776 , Z=-2682
GYRO : X=-605 , Y=28 , Z=-1923
Temperature:2805
ACC : X=16264 , Y=4588 , Z=-2324
GYRO : X=-404 , Y=-362 , Z=568
Temperature:2788
ACC : X=17156 , Y=-2930 , Z=-2542
GYRO : X=-1090 , Y=113 , Z=196
ACC : X=17554 , Y=-1932 , Z=-2094
GYRO : X=586 , Y=-1509 , Z=2648
Temperature:2723
ACC : X=17380 , Y=-1980 , Z=-2290
GYRO : X=-250 , Y=-57 , Z=-1
Temperature:2733
ACC : X=17630 , Y=582 , Z=-1344
GYRO : X=919 , Y=555 , Z=-2866
Temperature:2739
ACC : X=16100 , Y=4330 , Z=-2050
GYRO : X=-917 , Y=-948 , Z=-4507
Temperature:2742
ACC : X=15060 , Y=7624 , Z=-2274
GYRO : X=-931 , Y=-88 , Z=-2531
Temperature:2745
ACC : X=14334 , Y=8134 , Z=-2348
GYRO : X=290 , Y=0 , Z=4672
ACC : X=17540 , Y=1062 , Z=-660
GYRO : X=-725 , Y=169 , Z=-258
Temperature:2738
ACC : X=17246 , Y=2284 , Z=-128
GYRO : X=-1049 , Y=-206 , Z=-250
Temperature:2745
ACC : X=17560 , Y=1094 , Z=-802
GYRO : X=-190 , Y=-333 , Z=-2371
Temperature:2752
ACC : X=15522 , Y=6718 , Z=-1532
GYRO : X=-1233 , Y=-881 , Z=-5025
Temperature:2758
ACC : X=12136 , Y=11176 , Z=-1462
GYRO : X=-1309 , Y=-569 , Z=-5168
Temperature:2762
ACC : X=9374 , Y=13846 , Z=-1524
GYRO : X=-1167 , Y=-468 , Z=-2788
Temperature:2764
ACC : X=9766 , Y=12714 , Z=-2386
GYRO : X=757 , Y=-981 , Z=3324
Temperature:2769
ACC : X=14338 , Y=9206 , Z=-3278
GYRO : X=1002 , Y=-456 , Z=2208
Temperature:2773
ACC : X=16182 , Y=5124 , Z=-3054
GYRO : X=347 , Y=890 , Z=3239
Temperature:2774
ACC : X=17586 , Y=-76 , Z=-1722
GYRO : X=1395 , Y=713 , Z=5533
Temperature:2792
ACC : X=16948 , Y=-4276 , Z=-1744
GYRO : X=-36 , Y=-1080 , Z=2626
Temperature:2796
ACC : X=14582 , Y=-9724 , Z=-1482
GYRO : X=2475 , Y=-537 , Z=4286
Temperature:2801
ACC : X=10942 , Y=-13008 , Z=-558
GYRO : X=1316 , Y=-601 , Z=5066
Temperature:2805
ACC : X=8694 , Y=-14914 , Z=-278
GYRO : X=-117 , Y=-88 , Z=293
Temperature:2809
ACC : X=6540 , Y=-15778 , Z=314
GYRO : X=589 , Y=-556 , Z=2217
Temperature:2813
ACC : X=5366 , Y=-16216 , Z=654
GYRO : X=102 , Y=-407 , Z=720
Temperature:2817
ACC : X=7750 , Y=-14754 , Z=-2234
GYRO : X=-6157 , Y=-2149 , Z=-2878
Temperature:2826
ACC : X=11744 , Y=-7016 , Z=-11324
GYRO : X=-5323 , Y=-4320 , Z=-3759
Temperature:2832
ACC : X=9602 , Y=-2234 , Z=-14698
GYRO : X=-2110 , Y=-5370 , Z=-2714
Temperature:2835
ACC : X=3388 , Y=522 , Z=-17144
GYRO : X=-982 , Y=-4714 , Z=-2141
Temperature:2839
ACC : X=-594 , Y=1308 , Z=-17222
GYRO : X=-129 , Y=-1672 , Z=-933
Temperature:2842
ACC : X=-2078 , Y=1736 , Z=-16932
GYRO : X=-544 , Y=-2213 , Z=-938
Temperature:2842
ACC : X=-2782 , Y=1818 , Z=-16780
GYRO : X=-1355 , Y=109 , Z=-115
Temperature:2846
ACC : X=-1748 , Y=2996 , Z=-16712
GYRO : X=-679 , Y=1110 , Z=15
Temperature:2848
ACC : X=8994 , Y=676 , Z=-14522
GYRO : X=345 , Y=11567 , Z=62
Temperature:2849
ACC : X=14846 , Y=292 , Z=-10048
GYRO : X=804 , Y=3665 , Z=-53
Temperature:2850
ACC : X=16938 , Y=-108 , Z=-4118
GYRO : X=-2373 , Y=7016 , Z=1027